




اینکودر


تفاوت اینکودر چرخشی افزایشی و مطلق
مقدمه اینکودرها، حسگرهای حیاتی در دنیای اتوماسیون و کنترل حرکت هستند که برای اندازهگیری موقعیت زاویهای یا خطی به کار

ترانسمیتر اینکودر ؛ انتخابی هوشمند برای صنایع
مقدمه ترانسمیتر اینکودر (Encoder Transmitter) دستگاهی است که حرکت مکانیکی را به سیگنالهای الکتریکی تبدیل میکند. این سیگنالها میتوانند برای

انکودر آسانسور: قلب تپنده نظم و ایمنی
مراحل نصب انکودر آسانسور مقدمه در دنیای پرشتاب امروز، آسانسورها به رگ حیاتی ساختمانهای مرتفع تبدیل شدهاند و جابجایی

کاربرد اینکودر و انواع آن
کاربرد اینکودر و انواع آن مقدمه اینکودرها، سنسورهایی هستند که حرکت مکانیکی (چرخشی یا خطی) را به

فازهای خروجی در اینکودر
مقدمه اینکودرها (Encoder) دستگاههایی هستند که موقعیت زاویهای یا خطی یک شفت یا محور را به سیگنالهای الکتریکی تبدیل میکنند.

راهنمای جامع اینکودر های آتونیکس سری E50
اینکودر آتونیکس اینکودر آتونیکس (رمز گذار) در واقع یک تجهیز الکترومکانیکی است که حرکت یک دیوایس مکانیکی را یه

پی ال سی سپنتا مدل SEPANTA SP1-14SS2-T
استعلام بگیرید


پی ال سی سپنتا مدل SEPANTA SP1-14SS2-R
استعلام بگیرید


ماژول توسعه وزن سپنتا SEPANTA SPD1-02LC
استعلام بگیرید
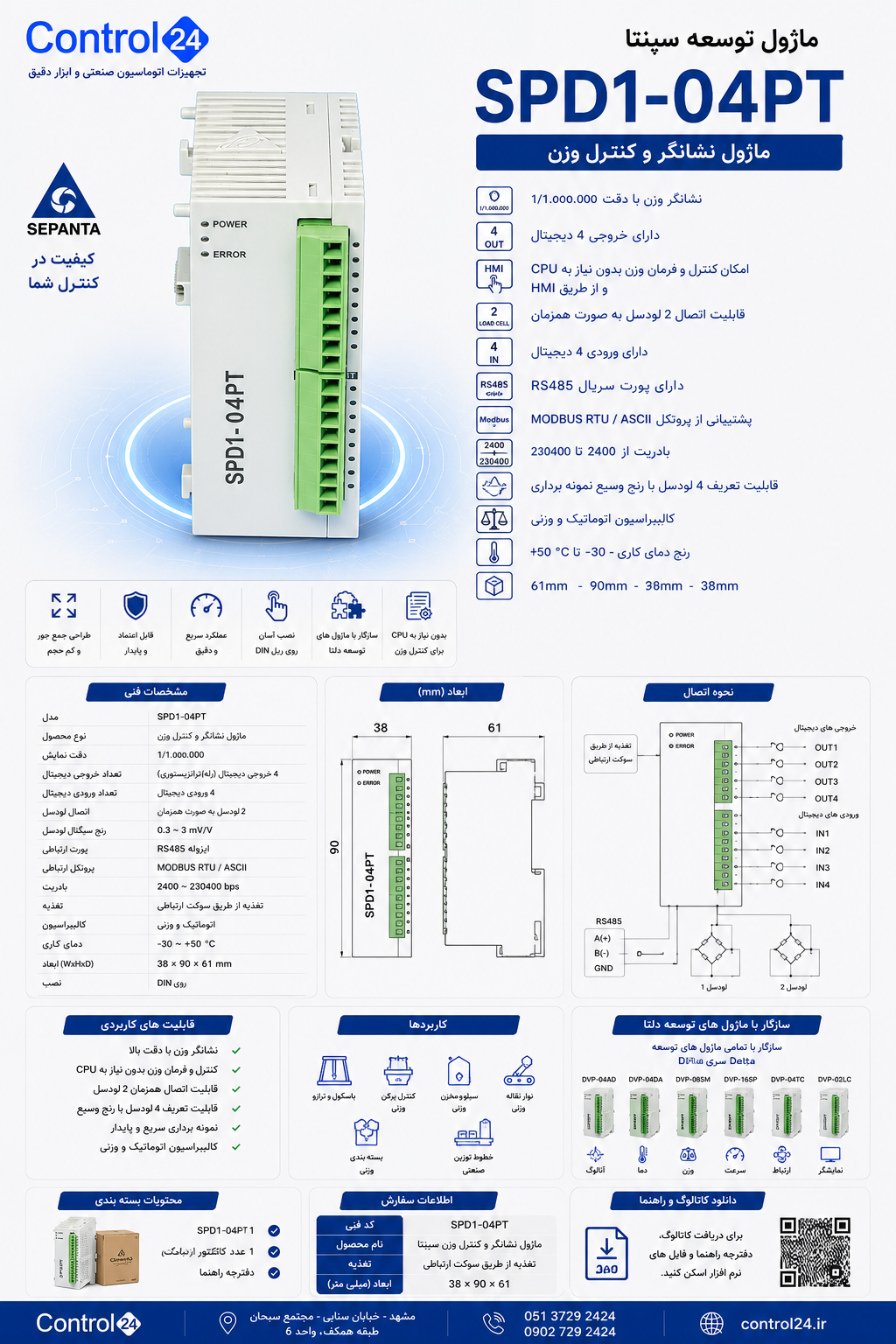
مشخصات ماژول توسعه وزن سپنتا SEPANTA SPD1-04PT:
- دارای ابعاد 61*90*38
- دارای 4 خروجی دیجیتال
- کالیبراسیون اتوماتیک و وزنی
- نشانگر وزن با دقت 1.100.000
- بادریت پورت از 2400 تا 230400
- دارای پورت سریال RS485 ایزوله
- قابلیت اتصال 2 لودسل به صورت همزمان
- امکان پشتیبانی از پروتکل MIDBUS RTU ASCII
- قابلیت تعریف 4 لودسل با رنج وسیع نمونه برداری
- امکان کنترل و فرمان وزن بدون نیاز به CPU و از طریق HMI
- رنج دمای کاری 30- تا 50+ سانتیگراد
- شرکت سازنده : SEPANTA
- کشور سازنده : ایران


ماژول توسعه دما سپنتا SEPANTA SPD1-04PT
استعلام بگیرید
مشخصات ماژول توسعه دما سپنتا SEPANTA SPD1-04PT
- دارای ابعاد 61*90*38
- دارای 8 خروجی ترانزیستوری
- دقت اندازه گیری 0.1 درجه سانتیگراد
- دارای 4 کانال PID بدون نیاز به CPU
- دارای دمای کاری از 30- تا 75+ درجه سانتیگراد
- بازه دمایی سنسور از 200- تا 500+ درجه سانتیگراد
- قابلیت ارتباط سریال RS485 با پروتکل MODBUS RTU
- امکان اتصال چهار کانال ورودی RTD از نوع PT100 و PT1000
- رنج وسیع بادریت (پورت RS485) از 2400 تا 230400 قابل تنظیم توسط کاربر
- شرکت سازنده : SEPANTA
- کشور سازنده : ایران
 پی ال سی و ماژول توسعه
پی ال سی و ماژول توسعه HMI
HMI اینورتر
اینورتر منبع تغذیه
منبع تغذیه لوازم جانبی
لوازم جانبی سنسور مجاورتی
سنسور مجاورتی سنسور دما و رطوبت
سنسور دما و رطوبت فیبر نوری
فیبر نوری مبدل و ایزیلاتور
مبدل و ایزیلاتور خط کش صنعتی
خط کش صنعتی سنسور فشار
سنسور فشار پرده نوری
پرده نوری ترانسمیتر و نمایشگر وزن
ترانسمیتر و نمایشگر وزن تجهیزات جانبی
تجهیزات جانبی اینکودر
اینکودر کوپلینگ
کوپلینگ ترانسمیتر انکودر
ترانسمیتر انکودر کنترلر و نمایشگر
کنترلر و نمایشگر نمایشگر وزن (توزین)
نمایشگر وزن (توزین) کانتر / تایمر
کانتر / تایمر کنترل فشار
کنترل فشار ولت متر و آمپر متر
ولت متر و آمپر متر کنترلر رطوبت
کنترلر رطوبت کنترل توان و رله ssr
کنترل توان و رله ssr انواع رله
انواع رله کنترل سطح و فلوتر
کنترل سطح و فلوتر ایمنی و کنترل
ایمنی و کنترل کلید جرثقیلی
کلید جرثقیلی میکروسوییچ
میکروسوییچ ملزومات
ملزومات ترمینال و پریز ریلی
ترمینال و پریز ریلی پوش باتن و کلید فرمان
پوش باتن و کلید فرمان ریل و داکت
ریل و داکت سوکت های صنعتی
سوکت های صنعتی تابلو برق
تابلو برق چراغ سیگنال
چراغ سیگنال کلید گردان (سلکتوری)
کلید گردان (سلکتوری) خازن و رگولاتور
خازن و رگولاتور سیم و کابل جریان ضعیف
سیم و کابل جریان ضعیف سیم افشان
سیم افشان کابل افشان
کابل افشان کابل فرمانی
کابل فرمانی کابل شبکه
کابل شبکه کابل آلومینیوم
کابل آلومینیوم کابل جوش
کابل جوش کابل مفتول
کابل مفتول کابل رشته ای
کابل رشته ای