




بلاگ

مقدمه
اینکودرها (Encoder) دستگاههایی هستند که موقعیت زاویهای یا خطی یک شفت یا محور را به سیگنالهای الکتریکی تبدیل میکنند. این سیگنالها به صورت پالسهایی هستند که توسط یک شمارنده الکترونیکی قابل شمارش بوده و به این ترتیب میتوان موقعیت دقیق شفت یا محور را تعیین کرد. یکی از مهمترین ویژگیهای اینکودرها، فازهای خروجی آنها است. در این مقاله، به بررسی دقیق فازهای خروجی در اینکودرها و کاربردهای آنها میپردازیم.
فازهای خروجی در اینکودر :
فازهای خروجی در اینکودر فازهای خروجی در اینکودرها، سیگنالهای پالسی هستند که توسط دیسک مدرج اینکودر تولید میشوند. این دیسک دارای الگوهای خاصی از شکافها یا برجستگیها است که هنگام چرخش، نور را از خود عبور میدهند یا مانع عبور آن میشوند. سنسورهای نوری موجود در اینکودر، این تغییرات نوری را تشخیص داده و سیگنالهای پالسی را تولید میکنند.
این فازها عموماً شامل لایههای پردازشی مختلف مانند لایههای LSTM (Long Short-Term Memory) یا انواع مختلف لایههای ترنسفورمر است.
این لایهها به شبکه امکان میدهند تا الگوهای پیچیده در دادههای ورودی را تشخیص داده و اطلاعات مورد نیاز را استخراج کند.
فازهای خروجی اینکودر نقش اساسی در کیفیت و عملکرد مدلهای یادگیری عمیق دارند و از آنجا که به عنوان مرحله آخر از فرآیند اینکودینگ عمل میکنند، میتوانند مستقیماً بر کیفیت خروجی نهایی مدل تأثیر بگذارند

اینکودر۱۰۰ پالس
انواع فازهای خروجی:
- فاز A و B: این دو فاز، پالسهایی با اختلاف فاز 90 درجه تولید میکنند. با استفاده از این دو فاز میتوان جهت چرخش شفت را تشخیص داد. اگر فاز A قبل از فاز B تغییر کند، شفت در یک جهت و اگر فاز B قبل از فاز A تغییر کند، شفت در جهت مخالف در حال چرخش است.
- فاز Z: این فاز یک پالس در هر دور کامل شفت تولید میکند. از این فاز برای تعیین موقعیت مرجع یا صفر شفت استفاده میشود.
- فازهای اضافی: برخی از اینکودرها، فازهای اضافی نیز دارند که برای افزایش دقت و قابلیت اطمینان استفاده میشوند.
در این مقاله سعی داریم به بررسی فازهای خروجی یک اینکودر ۵ سیمه بپردازیم :
سیم های خروجی اینکودر ۵ سیمه :
- تعداد ۲ سیم جهت تغذیه اینکودر
- تعداد ۳ سیم جهت فازهای خروجی (پالس ها) اینکودر
تعریف فاز خروجی به تفکیک:
به خروجی هایی از اینکودر که وظیفه ارسال پالس را دارند فاز خروجی اینکودر گفته می شود که اینکودرهای ۵ سیمه تعداد ۳ فاز خروجی دارند. فازهای خروجی اینکودر ۵ سیمه دارای ۳ فاز A ، B و Z می باشند.
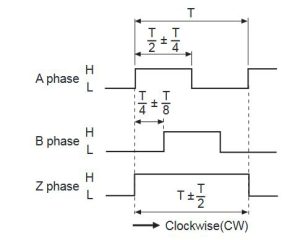
فازهای A و B به ازای یک دور کامل شافت اینکودر تعداد پالسی را درخروجی اعمال می کنند(با توجه به رزولیشن اینکودر) ، زمانیکه اینکودر CW باشد یعنی درجهت عقربه های ساعت بچرخد پالس های A به اندازه ۹۰ درجه از پالس های B زودتر در خروجی ایجاد می شوند و بالعکس زمانیکه اینکودر CCW باشد یعنی شافت اینکودر خلاف عقربه های ساعت بچرخد پالسهای فاز A به اندازه ۹۰ درجه عقب تر از فاز B در خروجی ظاهر می شوند.
نکته اول : با توجه به توضیحات داده شده در میابیم که در مواقعی که یک اینکودر را به شفت یک موتور محرک کوپل میکنیم در صورت چرخش اینکودر بصورت راستگرد پالس های فاز A از فاز B زودتر و در صورتی که برعکس این مورد اتفاق بیفتد فاز B زودتر از فاز A در خروجی اعمال می شود . در اتصال به PLC بدین صورت متوجه چپگرد و راستگرد بودن متور می شویم.
نکته دوم : این است که پالس A و B هردو تعداد پالس معینی در خروجی دارند و این بدین معنا است که تعداد پالسهایی که دریافت می شود هر دو یک تعداد هستند و به این جهت که اطمینان از تعداد پالس داشته باشیم می توانیم تعداد پالس هر دو فاز را با هم مقایسه کنیم.

کاربردهای فازهای خروجی:
- اندازهگیری سرعت: با شمارش تعداد پالسهای تولید شده در واحد زمان، میتوان سرعت چرخش شفت را محاسبه کرد.
- کنترل موقعیت: با مقایسه تعداد پالسهای تولید شده با یک مقدار مرجع، میتوان موقعیت دقیق شفت را کنترل کرد.
- تشخیص جهت چرخش: با استفاده از اختلاف فاز بین فازهای A و B میتوان جهت چرخش شفت را تشخیص داد.
- سینک کردن با سایر دستگاهها: فاز Z میتواند برای سینک کردن اینکودر با سایر دستگاهها استفاده شود.
سخن آخر
فازهای خروجی در اینکودرها، نقش بسیار مهمی در عملکرد این دستگاهها دارند. با درک کامل این فازها و کاربردهای آنها، میتوان از اینکودرها در طیف وسیعی از کاربردهای صنعتی و کنترل حرکت استفاده کرد. انتخاب نوع اینکودر و تعداد فازهای مورد نیاز، به دقت مورد نیاز، سرعت چرخش شفت و سایر پارامترهای کاربرد بستگی دارد.
اینکودر ها در برند ها و قیمت های مختلفی در بازار وجود دارد برخی از این برند ها آتونیکس ، کاکن ، فناک ، اپکن ، واخندورف و… است.
برای خرید اینکودر به سایت کنترل24 مراجعه کنید و یا از طریق لینک زیر با کارشناسان ما در ارتباط باشید.


پی ال سی سپنتا مدل SEPANTA SP1-14SS2-T


پی ال سی سپنتا مدل SEPANTA SP1-14SS2-R


ماژول توسعه وزن سپنتا SEPANTA SPD1-02LC
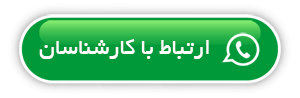
مشخصات ماژول توسعه وزن سپنتا SEPANTA SPD1-04PT:
- دارای ابعاد 61*90*38
- دارای 4 خروجی دیجیتال
- کالیبراسیون اتوماتیک و وزنی
- نشانگر وزن با دقت 1.100.000
- بادریت پورت از 2400 تا 230400
- دارای پورت سریال RS485 ایزوله
- قابلیت اتصال 2 لودسل به صورت همزمان
- امکان پشتیبانی از پروتکل MIDBUS RTU ASCII
- قابلیت تعریف 4 لودسل با رنج وسیع نمونه برداری
- امکان کنترل و فرمان وزن بدون نیاز به CPU و از طریق HMI
- رنج دمای کاری 30- تا 50+ سانتیگراد
- شرکت سازنده : SEPANTA
- کشور سازنده : ایران


ماژول توسعه دما سپنتا SEPANTA SPD1-04PT
مشخصات ماژول توسعه دما سپنتا SEPANTA SPD1-04PT
- دارای ابعاد 61*90*38
- دارای 8 خروجی ترانزیستوری
- دقت اندازه گیری 0.1 درجه سانتیگراد
- دارای 4 کانال PID بدون نیاز به CPU
- دارای دمای کاری از 30- تا 75+ درجه سانتیگراد
- بازه دمایی سنسور از 200- تا 500+ درجه سانتیگراد
- قابلیت ارتباط سریال RS485 با پروتکل MODBUS RTU
- امکان اتصال چهار کانال ورودی RTD از نوع PT100 و PT1000
- رنج وسیع بادریت (پورت RS485) از 2400 تا 230400 قابل تنظیم توسط کاربر
- شرکت سازنده : SEPANTA
- کشور سازنده : ایران



 پی ال سی و ماژول توسعه
پی ال سی و ماژول توسعه HMI
HMI اینورتر
اینورتر منبع تغذیه
منبع تغذیه لوازم جانبی
لوازم جانبی سنسور مجاورتی
سنسور مجاورتی سنسور دما و رطوبت
سنسور دما و رطوبت فیبر نوری
فیبر نوری مبدل و ایزیلاتور
مبدل و ایزیلاتور خط کش صنعتی
خط کش صنعتی سنسور فشار
سنسور فشار پرده نوری
پرده نوری ترانسمیتر و نمایشگر وزن
ترانسمیتر و نمایشگر وزن تجهیزات جانبی
تجهیزات جانبی اینکودر
اینکودر کوپلینگ
کوپلینگ ترانسمیتر انکودر
ترانسمیتر انکودر کنترلر و نمایشگر
کنترلر و نمایشگر نمایشگر وزن (توزین)
نمایشگر وزن (توزین) کانتر / تایمر
کانتر / تایمر کنترل فشار
کنترل فشار ولت متر و آمپر متر
ولت متر و آمپر متر کنترلر رطوبت
کنترلر رطوبت کنترل توان و رله ssr
کنترل توان و رله ssr انواع رله
انواع رله کنترل سطح و فلوتر
کنترل سطح و فلوتر ایمنی و کنترل
ایمنی و کنترل کلید جرثقیلی
کلید جرثقیلی میکروسوییچ
میکروسوییچ ملزومات
ملزومات ترمینال و پریز ریلی
ترمینال و پریز ریلی پوش باتن و کلید فرمان
پوش باتن و کلید فرمان ریل و داکت
ریل و داکت سوکت های صنعتی
سوکت های صنعتی تابلو برق
تابلو برق چراغ سیگنال
چراغ سیگنال کلید گردان (سلکتوری)
کلید گردان (سلکتوری) خازن و رگولاتور
خازن و رگولاتور سیم و کابل جریان ضعیف
سیم و کابل جریان ضعیف سیم افشان
سیم افشان کابل افشان
کابل افشان کابل فرمانی
کابل فرمانی کابل شبکه
کابل شبکه کابل آلومینیوم
کابل آلومینیوم کابل جوش
کابل جوش کابل مفتول
کابل مفتول کابل رشته ای
کابل رشته ای